Search

Description
=== SET DESCRIPTION===
3D Path-Following with Articulated 6DoF Robot and ToF Sensors - Video Data Set
https://doi.org/10.34808/92gd-2y47
Authors:
Tymon F. Wawrzyniak, Ignacy D. Orłowski , Marek A. Galewski
Gdansk University of Technology
Faculty of Mechanical Engineering and Ship Technology
G. Narutowicza 11/12, 80-233, Gdansk, Poland
This set contains supplementary material for the paper:
"Three-Dimensional Path-Following with Articulated 6DoF Robot and ToF Sensors"
https://doi.org/10.3390/app15062917
The video presents 5 test runs showing the results of path following using the algorithm proposed in the paper.
=== Acknowledgment ==
The Nachi MZ04 robot used for experimental investigation was acquired thanks to the internal Gdansk-Tech grant: IDUB CoreEduFacilities 14/2021/EDU – MecHaRo-Lab project
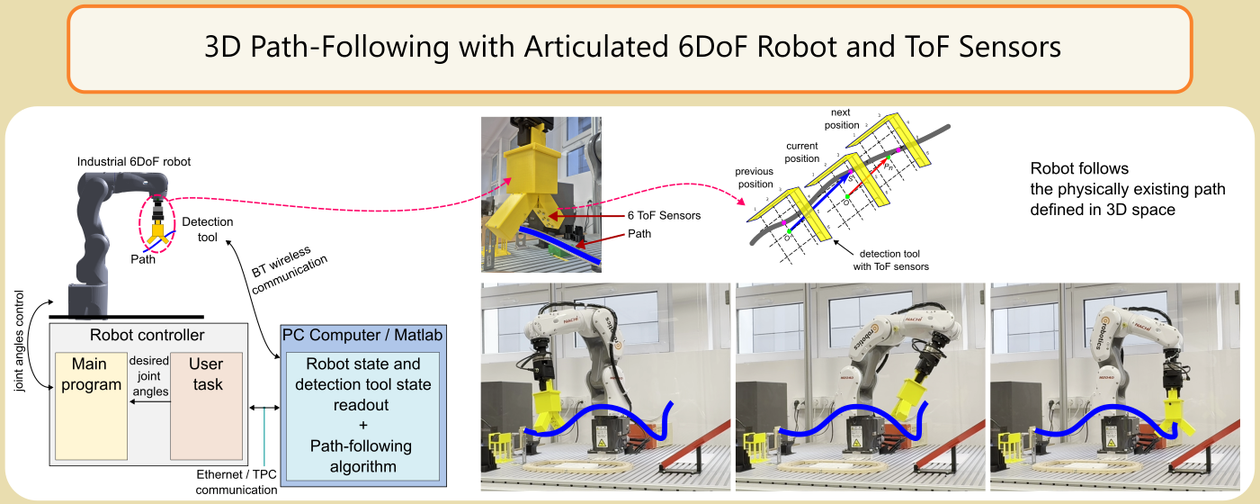
Selected views from the data set showing the robot during path following .

Dataset file
hexmd5(md5(part1)+md5(part2)+...)-{parts_count} where a single part of the file is 512 MB in size.Example script for calculation:
https://github.com/antespi/s3md5
File details
- License:
-
 open in new tab
CC BY-NCNon-commercial
open in new tab
CC BY-NCNon-commercial - File embargo:
- 2025-03-08
Details
- Year of publication:
- 2025
- Related location:
- Gdańsk University of Technology, Faculty of Mechanical Engineering and Ship Technology, MecHaRo-Lab (54° 22′ 19″ N, 18° 36′ 54″ E)
- Verification date:
- 2025-03-11
- Creation date:
- 2024
- Dataset language:
- English
- DOI:
- DOI ID 10.34808/92gd-2y47 open in new tab
- Verified by:
- Gdańsk University of Technology
Keywords
Cite as
Authors
seen 27 times